
CN/EN
 Message
Message


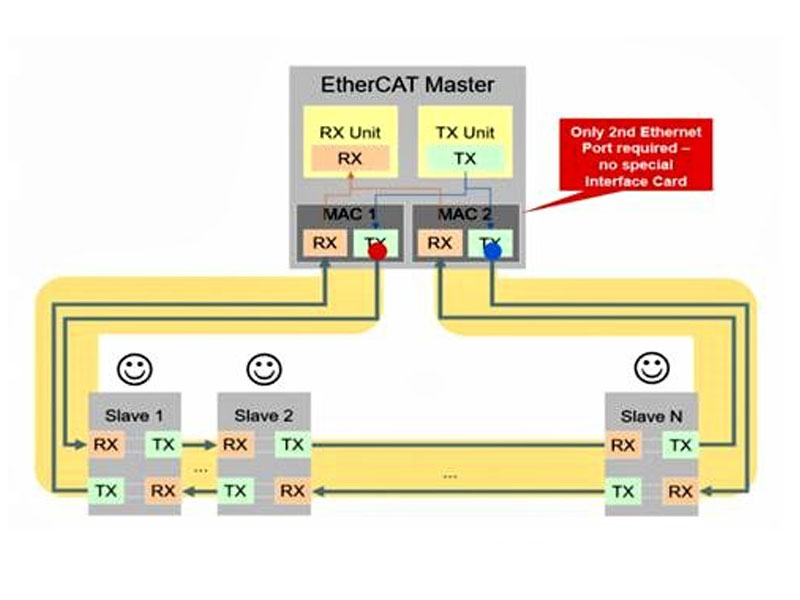

(1) control mode based on EtherCAT bus protocol.
(2) excellent real-time performance.
(3) to realize the motion control functions of fixed-length motion, linear interpolation and arch motion interpolation.
(4) relevant supporting software, mainly including the following functions:
1. The synchronization parameters, the initialization parameters of the slave station and the periodic data PDO of the controller can be configured
2. Configuration information can be imported from the archive, exported to the archive, solidified to the controller, loaded from the controller;
3. Real-time monitoring slave real-time information, alarm abnormal and other related information;
4. The controller has the function of debugging the slave station.








